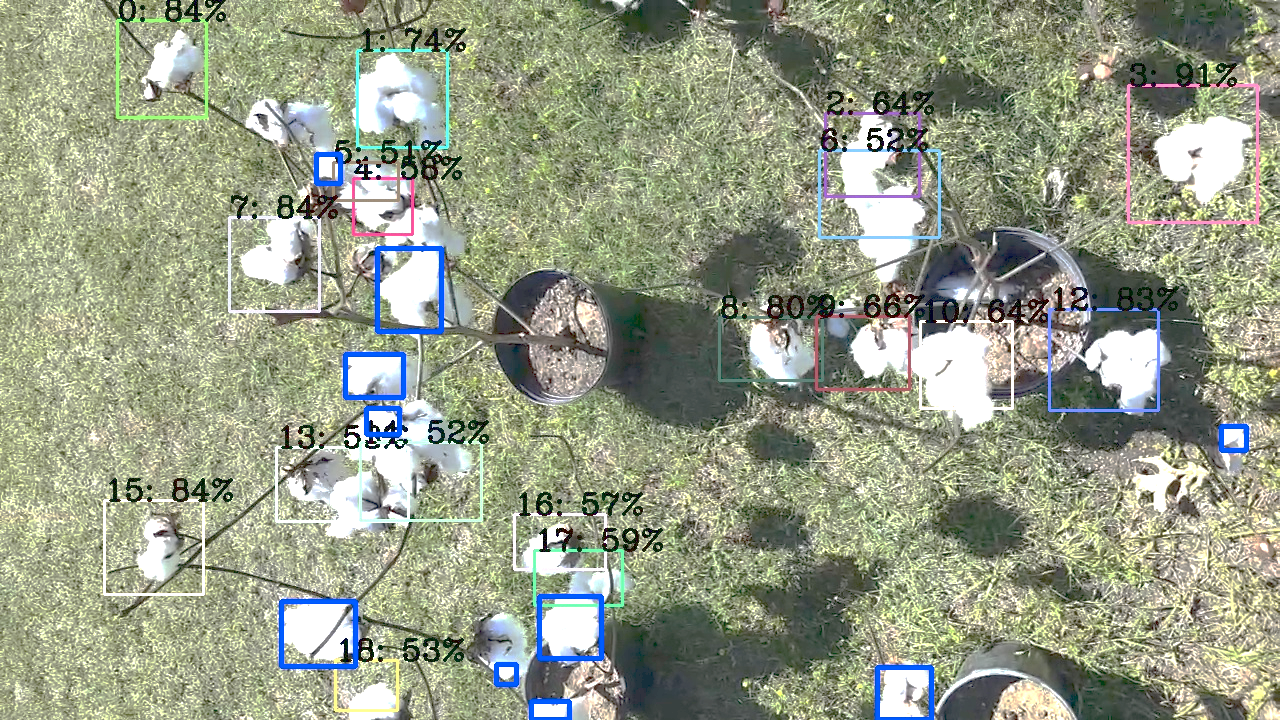
Robotic cotton harvesting platform
Current cotton harvesting is an expensive production cost for farmers. As computer processing speeds have increased, sensors have become smaller and cheaper, and robotics advanced, scientists have reached a point where they can develop economical mobile platforms to perform real-time agricultural operations. UGA entomologists are developing an artificial intelligence to classify and locate cotton bolls using an inexpensive 3-D camera and NVIDIA Jetson TX-2 processor. They have developed an ensemble method of deep learning, color segmentation and image transformation to track and count cotton bolls from a camera on a mobile harvester in real-time. In each image taken by a camera, a trained deep learning method, the YOLOv2 (You Only Look Once) model is used to detect open cotton bolls and then color segmentation applied to detect bolls missed by the YOLO model. Each boll tracked is stored using vectors that are counted to give the total number of bolls detected. In this research, the accuracy is sacrificed for speed by using the YOLO model compared to other deep learning methods which offer higher accuracy with low processing speed. However, accuracy increased by developing an ensemble method that combines image color segmentation and image transformation to achieve accuracy and sensitivity of 93 percent, and precision of 99.9 percent. This method illustrates the ability to track and count cotton bolls in real-time for the development of a robotic cotton harvesting system. The overall goal is to develop swarms of small autonomous robotic cotton harvesters that continuously harvest bolls as they open. Some advantages include increase in cotton quality, uniformity and less contamination. Small farmers would have access to cotton production using the appropriate number of small harvesters that would be much less expensive than the current cotton harvesters.
Related Impact for A world leader in entomology research
- Bermudagrass stem maggot 2018
- Diamondback Moth Insecticide Resistance 2018
- Integrating Wetland Ecoystem Services into Agriculture 2018
- Invasive fire ant species 2018
- Investigating vector physiology 2018
- Parasite-host interactions 2018
- Pecan Insect Pest Management 2018
- Spotted-Wing Drosophila in Blueberries 2018